


简介
TJA(Traffic Jam Assistant)交通拥堵辅助系统,在堵车时候,为驾驶员提供一定的辅助系统,缓解驾驶员的疲劳。主要针对车速较低时(一般是0-60km/h),为驾驶员同时提供横向和纵向的辅助控制功能。当路面上有清晰车道线而且自行车前方一定距离内没有参考车辆时,TJA功能能控制车辆以一定的车速在车道线中间位置行驶。而如果车辆前方有参考车辆时,TJA功能能控制车辆按照前车的行驶轨迹行驶,并主动控制自行车的加减速,控制车辆和前车保持一定的时距。TJA不允许驾驶员长时间脱手驾驶,在驾驶员接管的环境下(例如转弯、路口、并道、前方车辆切入等),驾驶员需全权负责车辆的驾驶。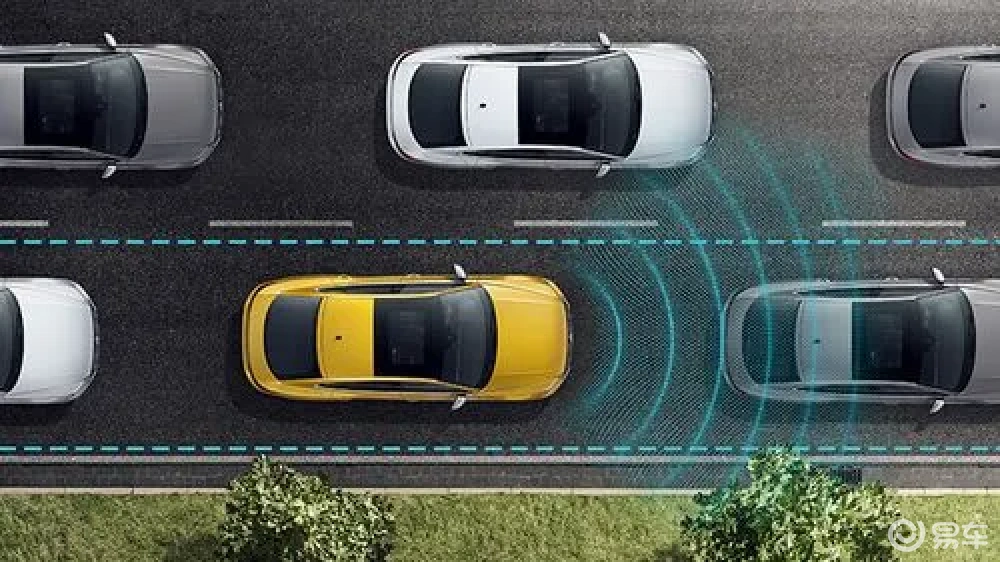
TJA的控制原理
TJA采用了“前视摄像头FCM+前毫米波雷达FRM”的1R1V传感器数据融合方案,总体来说,TJA的轨迹预测过程包括对于静态环境估计(如车道模型),环境过程估计(一般指车道环境中行驶的车辆),此外还包括附加传感器(诸如导航信息、环视摄像头信息等)对TJA估计过程的优化。
静态环境估计:静态环境估计一般指对于行驶车道模型估计,车道模型的一般估计方法是采用抛物线形式进行,而以自车坐标为原点建立的车道抛物线模型表示为f(x)=1/2*x²,该抛物线只有两个参数,其求解过程是通过在实际估计过程中对道路模型中的两个实际障碍电的探测,其结果便可带入到抛物线中进行二参数方程求解。同时通过不断更新的实际点代入方程求解后获得不同的方程参数解,对方程解的评价过程是利用直方图描述其求解质量的,若实际探测到的前方目标位置与预测轨迹曲线差值不具有一致性,那么相应的直方图分布就比较零散,不具有集中分布的特性。直方图具有收敛一致性时,说明求解的抛物线方程是有效的。
动态过程估计:动态过程估计是指对于目标车辆的行驶轨迹预测,有两种不同的计算TJA行驶轨迹的方法,其一是关注附近运动车辆的位置,而另一个涉及车道标记。由于环境探测过程中不止一辆车,因此相应的估计过程包含如下几个步骤:
1、传感器探测到环境中的所有车辆目标,TJA系统模型对于所有运动车辆的历史轨迹进行估算。
2、选择自车前方对应的车辆作为跟随目标,且该对应前方车辆需要去除对向来车对本车轨迹估计的影响。
3、采用如上提到的曲线模型对实际探测到的同向行驶车辆进行轨迹预测,并对于预测结果进行分组。
4、计算估计轨迹质量,质量评估采用权重分配,权重最高的最为轨迹曲线的计算结果。
TJA系统触发、关闭
1、TJA系统触发:在满足一定的条件后,TJA系统会在仪表盘上提示:“Traffic Jam Pilot available”。Audi车子上面会有一个“AUDI AI”的物理键,一键可触发TJA功能,系统接管车辆的控制,但是人必须将双手放于方向盘上,准备随时接管车辆的控制。这时候车辆控制系统可以控制汽车的转向和油门等活动。车辆会根据策略,保持跟车车距,并时刻监测是否有加塞的车辆插入,做车辆转向微调和跟车动作。同时传感器也会检测驾驶员随时接管汽车控制系统的就绪状态,防止驾驶员过于信任TJA系统,而疏忽大意,放任自流。
2、TJA系统关闭:在完成交通堵塞辅助任务后,系统会提示驾驶员:Traffic Jam Pilot will be deactivated,Please take full control!!
(部分图片来源网络)