


而特斯拉最早是靠视觉方案起家,因此对摄像头的应用更广泛,同时因为对摄像头技术的积累,在视觉方面经验更丰富,比如前置的ADAS摄像头就是三目摄像头,同时在车身周围也是使用摄像头来进行旁边车辆的判断,因此在摄像头数量上会更多。
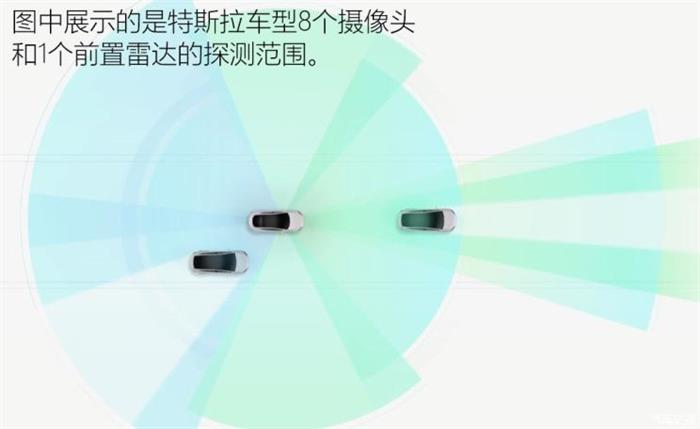
而长安使用毫米波雷达对摄像头进行了替换,因此我们会发现长安UNI-T的毫米波雷达多达5个,其实本质都是为了监测周围车道和障碍物,只不过实现的硬件不同。至于效果,视觉监测一般识别精准度上会更高,但受到环境影响较大,而毫米波雷达对环境的包容度更高,至于判断精度和反应速度目前还不好下定论,理论上讲没有太多问题。
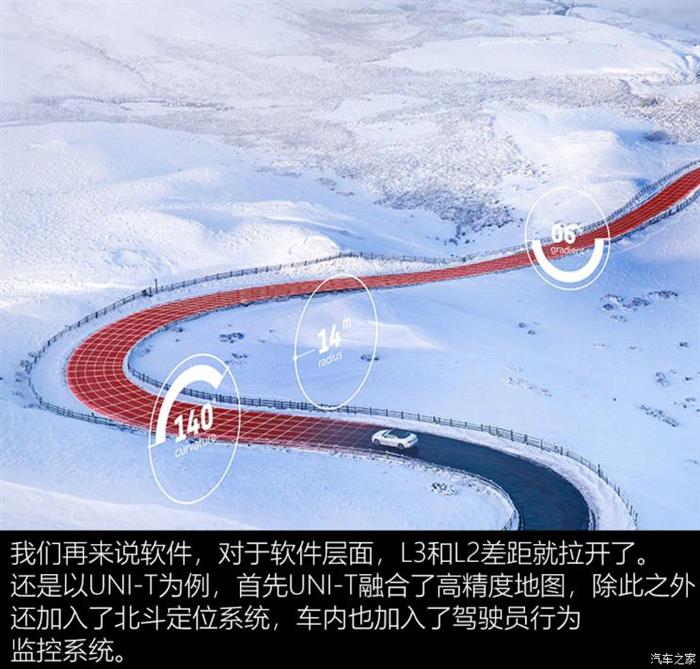
这些功能主要作用在自动驾驶阶段,其中高精度地图可以对车辆的路线决策起到辅助作用,而北斗定位系统则能保证车辆的定位在10cm级别,只有对本身更精准的位置把控,才能在超车、车道保持等操作中变得更准确。

这是L2不具备的,实际上L2即便在驾驶辅助功能工作时,也不允许手离开方向盘,因为手一旦离开方向盘,就意味着所有责任由车辆系统担任。
在法律层面和保险方面也是L3和L2之间的一道鸿沟。目前法律是禁止双手脱离方向盘进行驾驶的,而在进行特定场景的自动驾驶时,驾驶员是脱手的,因此此时责任划分就是一个很重要的问题,如果发生交通事故如何判定也是政府和保险公司需要考虑的。
