


降本方案其实是一个明牌,很多读者朋友可能已经在心里面抢答了:阉割激光雷达。
车百智库曾经在2023年发布的《自动驾驶全场景商业化应用(2022)》里估算过小鹏P5智驾系统感知传感器的成本。根据当时的数据,小鹏P5感知传感器系统的总成本为13,245元,成本大头是两颗7660元的激光雷达,激光雷达的成本占比高达58%。不过,在过去的一年中,激光雷达的价格出现了明显的下降,成本占比大概降到了一半左右。

图片来源:车百智库
去激光雷达的手段可谓简单粗暴,但是,降本的同时必须遵守保证高阶智驾功能基本不降级的前提。如果伴随着成本削减的是功能明显降级,那还有什么意义?所以,问题再次发生了转变:去激光雷达之后,还能不能保得住智驾等级中的“加号”?
在过去的几年里,纯视觉派和激光雷达派有过多次争论,不过,多数人不过是立场之争,并没有触及到问题的本质。要找到到底能不能去激光雷达这个问题的答案,其实可以结合BEV和占用网络这两个对城区NOA功能最重要的技术栈,拆解成两个问题:(小鹏的)BEV有没有做到去激光雷达,(小鹏汽车)是不是能以纯视觉方式实现占用网络?
如果不可以,激光雷达再贵也没法丢弃,如果可以,激光雷达再便宜,用它又有什么意义?
小鹏汽车的BEV和占用网络做到了什么程度,我们可以从他们的技术分享里去找答案。在2023年的CVPR会议上,小鹏汽车的前AI团队负责人刘兰个川做了一次主题演讲,介绍了小鹏汽车在过去的几年中智能驾驶技术上的成果和重大进展。在BEV感知环节,刘兰个川表示XNet是一个以视觉为中心的系统,先通过Backbone对来自摄像头的信息进行特征提取,再通过Transformer的交叉注意力机制将融合特征转换到BEV空间,下面这张图显示,BEV感知不会用到来自激光雷达的信号,换句话说,XNet的BEV已经实现了去激光雷达,考虑到激光雷达的成本,图里的“cost- effective”就来自这里。
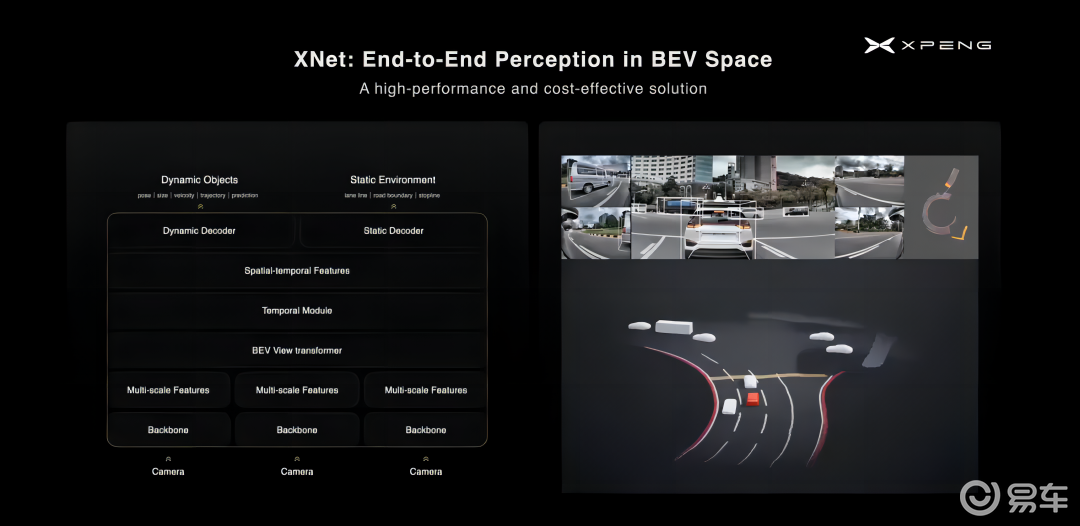
图片来源:小鹏汽车
BEV可以去激光雷达,那么占用网络呢,通用障碍物的感知呢?还是在这次会议上(时间为2023年6月份),刘兰个川在问答环节中表示,小鹏汽车在占用网络里使用了激光雷达。
激光雷达之于高阶智驾的主要作用是通用障碍物的识别。通用障碍物和占用网络的关系可以这么来理解:虽然BEV识别不出来前方某个物体到底是什么,但是,激光雷达的3D点云信息明明白白地表示,有个物体在那里,那里的空间已经被“占用”了,被占用的空间大概率不是可行驶区域。
3D点云确实大有作用,但并非必选项。理论上,如果能够依靠纯视觉神经网络实现对障碍物距离信息的精准估计,激光雷达的权重就可以大大降低,甚至从占用网络中被排除出去。因为,从第一性原理出发,人类的眼睛(生物形式的感知传感器)和大脑(生物形式的神经网络)可以估计距离信息,类比过来,数字形式的感知传感器(摄像头)和数字形式的神经网络只要被训练得足够充分,也可以估计障碍物的距离信息。
这个第一性原理,马斯克在多个场合宣扬了很多遍,不过,原理归原理,落地归落地,在特斯拉跑通这种技术路线之前,资源有限的国内车企保持怀疑是合理的。所幸,自动驾驶量产王者、行业标杆特斯拉率先攻坚,验证了第一性原理,把目光投向国内,自动驾驶行业先驱百度(极越)通过国内首个纯视觉占用网络OCC再次确认了这条技术路线。有了两个行业领头羊的背书,小鹏汽车毋庸置疑地也要跟进纯视觉方案实现占用网络。
去掉激光雷达,转向纯视觉,可以实现智驾传感器系统成本减半。不过,为了实现智能驾驶系统总成本减半,小鹏汽车的XNGP方案还需要减掉一颗英伟达Orin芯片。据有关报道,一颗Orin-X的价格在500美金左右,是一笔不可忽视的成本大项。